
Ciao a tutti!
L’ultima volta vi avevo spiegato come avevo costruito la struttura della CNC e come funziona il programma per farla muovere. Rimane ora da vedere la parte elettronica e in questo articolo vi parlerò di cosa lega il codice alla macchina.
Cominciamo!
Il controller
Come già detto in precedenza per il controller ho deciso di usare un Raspberry Pi 3 model B (per poi sostituirlo con un model A).
L’ho preferito al classico Arduino per tre semplici motivi:
- lo possedevo già 😁
- ero molto curioso di imparare ad usarlo
- volevo realizzare una CNC completamente fatta in casa, compresa l’elettronica, la meccanica e la parte software
Il Raspberry Pi 3 model B ha le seguenti caratteristiche:
- SoC: Broadcom BCM2837 Quad Core Cortex-A53 a 1.2 GHz, 32 kB L1 e 512 kB L2
- GPU: Broadcom VideoCore IV Dual Core a 400 MHz
- RAM: 1GB LPDDR2 a 900 MHz
- Rete: Ethernet 10/100, WiFi n 2.4 GHz, Bluetooth 4.1 + LE
- Porte: microSD, HDMI 1.4 CEC, jack 3. 5 mm, 4× USB 2.0 (SMSC LAN9514)
- Interfacce: CSI, DSI, GPIO header 40-pin
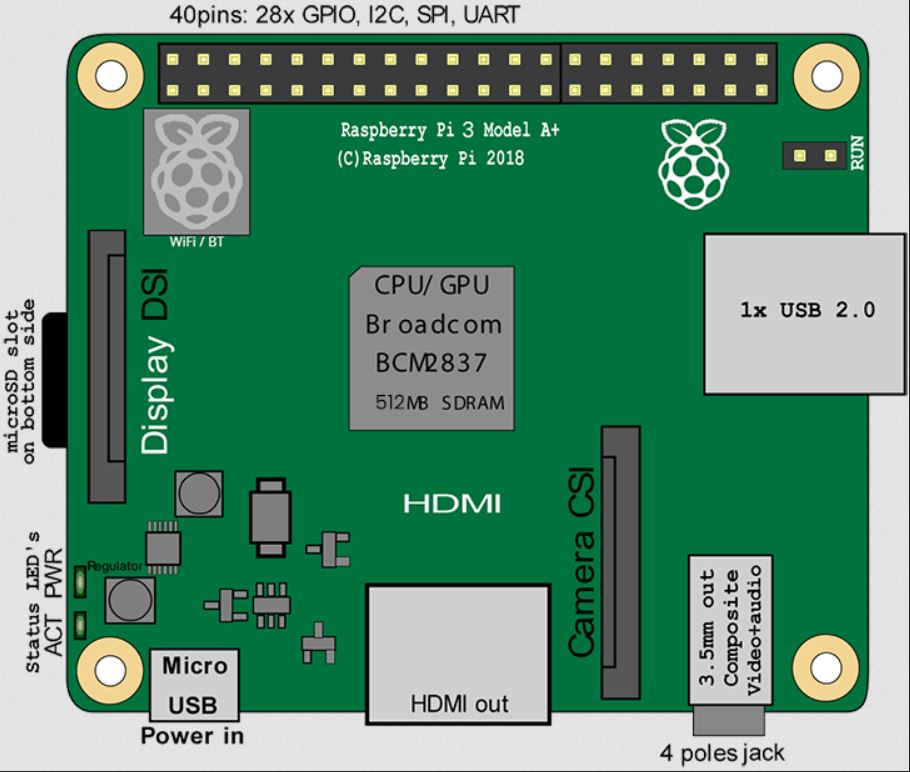
Trovate altre informazioni al link: RaspberryPi 3 model B specifiche tecniche.
I collegamenti
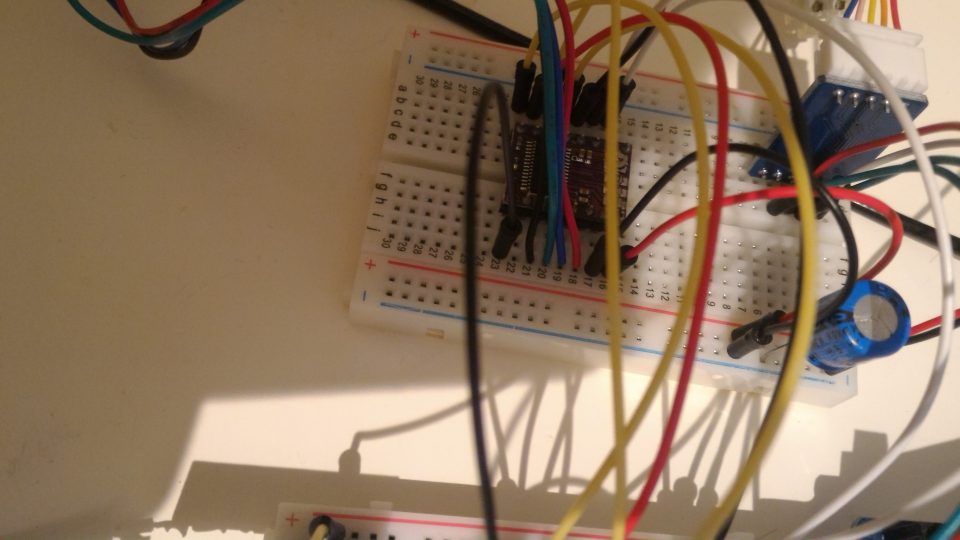
All’inizio ho preferito utilizzare una breadboard per effettuare i collegamenti tra il Raspberry Pi e i driver dei motori passo passo anche perché il circuito della CNC volevo crearmelo io con la macchina stessa una volta che questa fosse funzionante.
In generale lo schema semplificato dei collegamenti è il seguente:
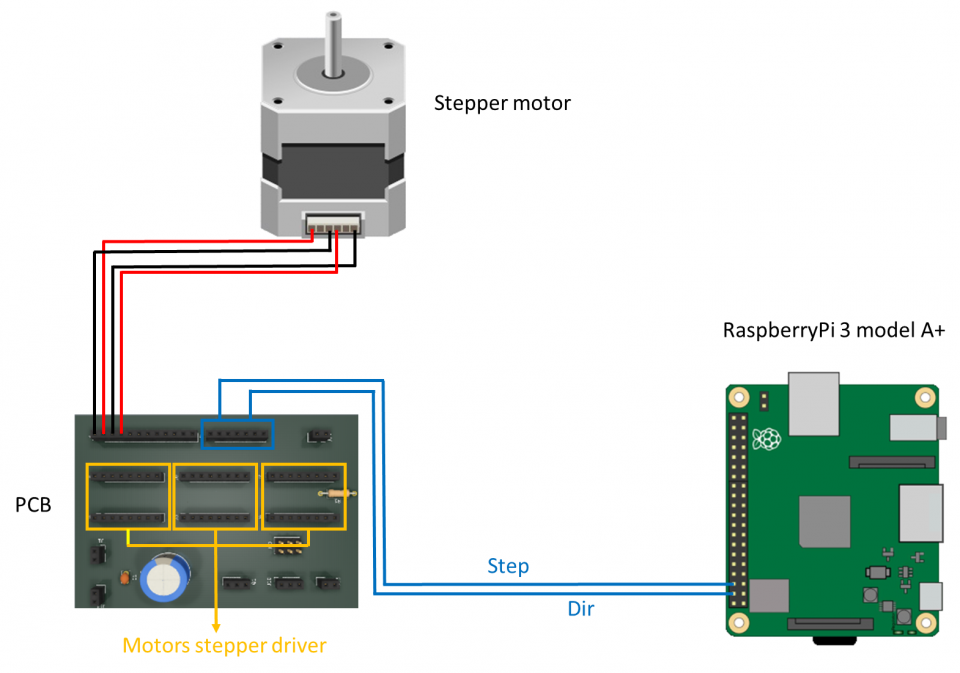
dove Step rappresenta il segnale di controllo del motore passo-passo (ogni impulso provoca l’avanzamento del motore di un passo) mentre Dir rappresenta il segnale che controlla la direzione: quando l’uscita Dir è alta, la rotazione avviene in un senso mentre quando è bassa avviene nel senso contrario.
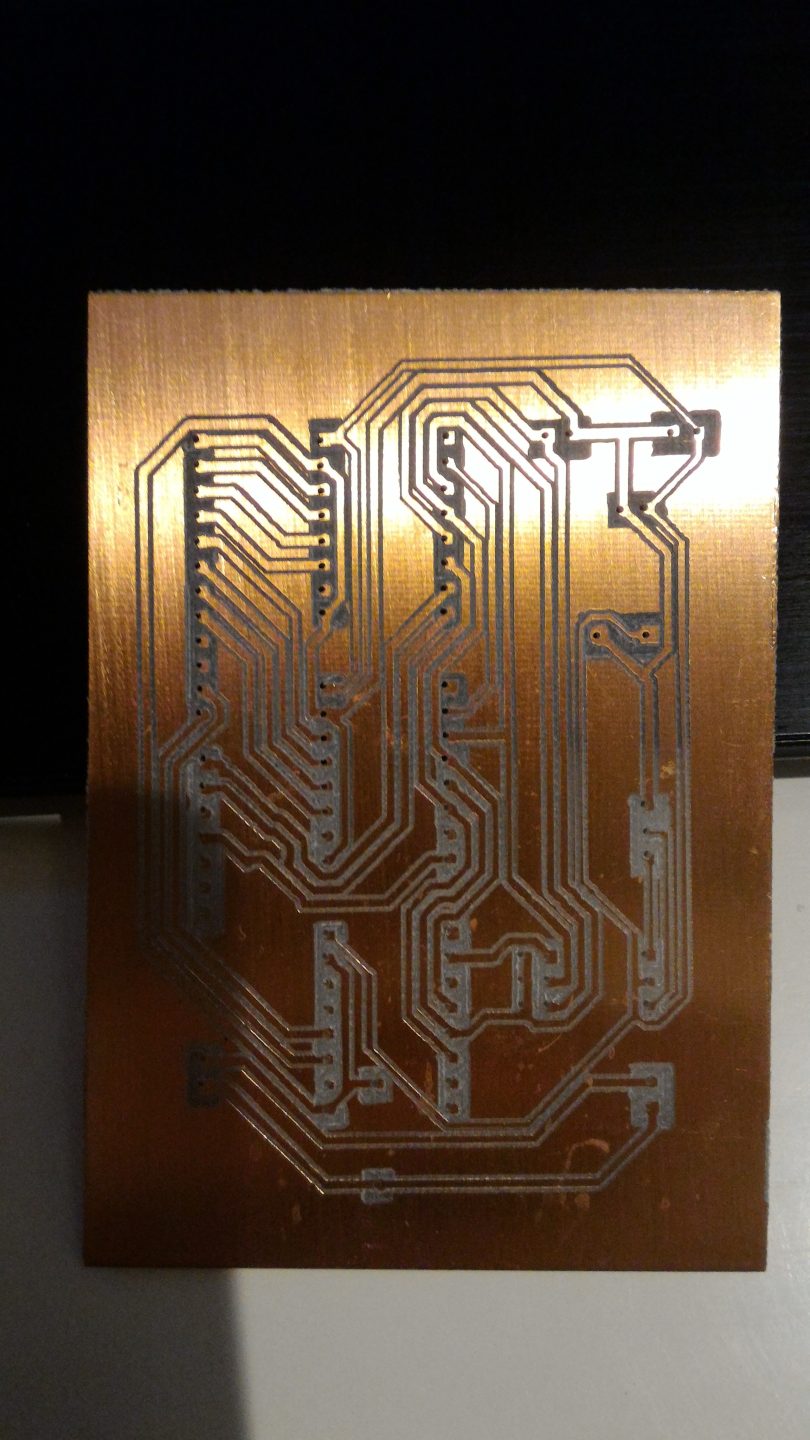
Una volta collaudata la CNC ho provato a creare il suo circuito in modo da poter sostituire la breadbord (o almeno in parte) con tutti i suoi mille cavi colorati 🌈 e il risultato è stato questo:

Conclusioni
Allo stato attuale quindi la parte elettronica si presenta così:
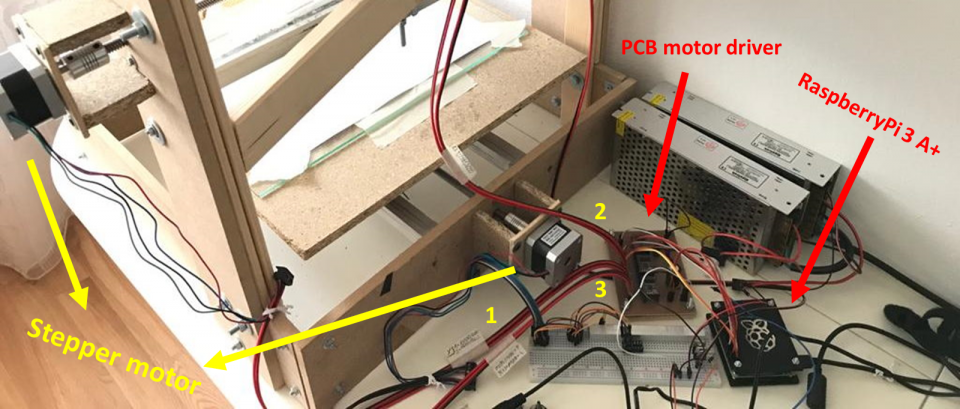
I numeri 1, 2 e 3 indicano i cavi di collegamento con i motori passo-passo, uno per ogni asse XYZ.
Purtroppo non sono ancora ruscito a rimpiazzare completamente la breadboard perchè una parte della PCB non funziona ancora bene in quanto soffre dei disturbi provocati dalle correnti parassite generate dal motore brushed che utilizzo come utensile (trapano) e dovrò quindi fare un circuito a parte per il controllo del motore. Al momento, se lo collego alla scheda PCB della macchina senza usare la breadbord si crea un interferenza con i motori passo-passo che provoca dei movimenti incontrollati degli assi.
In conclusione: ci saranno sicuramente altre cose che si possono migliorare/sistemare, ma per ora sono soddisfatto di quanto ho fatto e… ci sono altri progetti che mi aspettano! 🤩
A presto 😁👋🏻